
Commande d'un outil à charioter
L'exemple ci-après paraitra provocateur à tout concepteur ayant déja une bonne expérience du hard. Il mènerait en effet
conception, modélisation et matérialisation du circuit dans la plus pure tradition graphe d'états.
Voyons tout de mème une approche RdP et nous commenterons en conclusion.
Cahier des charges (CdC)
Considérons l'outil à charioter ci-dessous. Une action sur le bouton poussoir m1 déclenche un aller-retour de
l'outil usinant une rainure dans la pièce métallique P. Une action sur le bouton-poussoir m2 déclenche deux aller-retours
pour une pièce plus difficile à usiner.
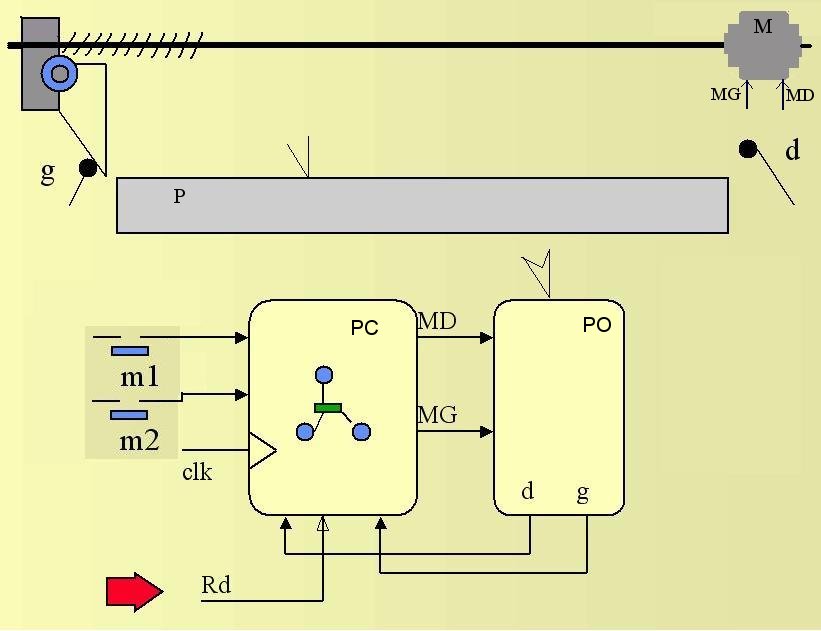
Aménagement particulier au CdC:
Si après avoir appuyé sur m1, et à tout instant lors de ce premier aller-retour,
l'opérateur estime qu'un deuxième passage est nécessaire, il appuie sur m2. Cela doit déclencher un deuxième aller-retour
aussitot l'outil revenu en appui sur le fin de course (fdcg) g.
Modélisation:
Modélisons de façon progressive.
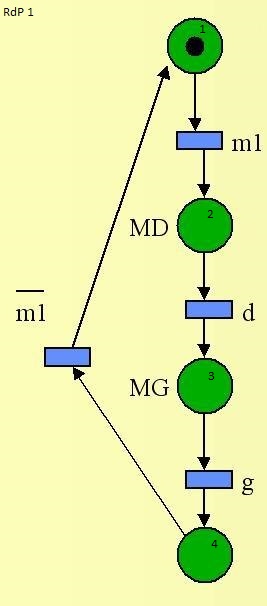
Premier mode: Aller-retour simple ou mode m1 (RdP 1).
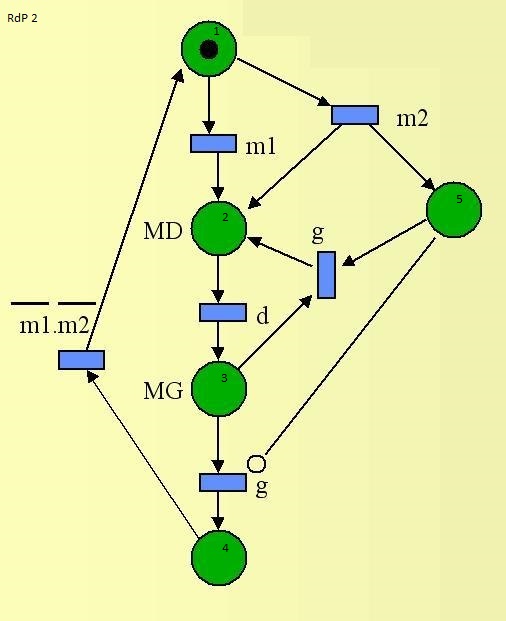
Deuxième mode: Demande de deux aller-retours ou mode m2 (RdP 2).
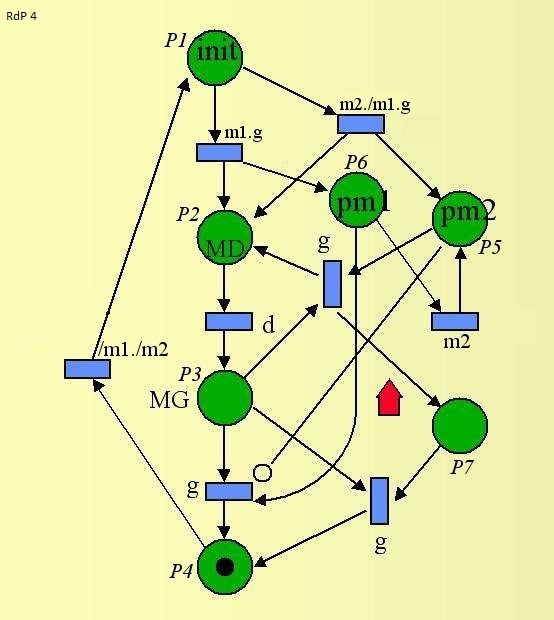
Troisième mode: Cas d'un appui sur m2 après m1 soit (mode m1-m2) (RdP m1-m2).
Observations:
- L'analyse du réseau (m1-m2) nous signale la présence de conflits. Les places P3 et P5 présentent des arcs de sortie
aboutissant à des jonctions distinctes, elles sont susceptibles d'ètre à l'origine de conflits. On vérifie que l'interprétation
du réseau solutionne ces risques de conflits.
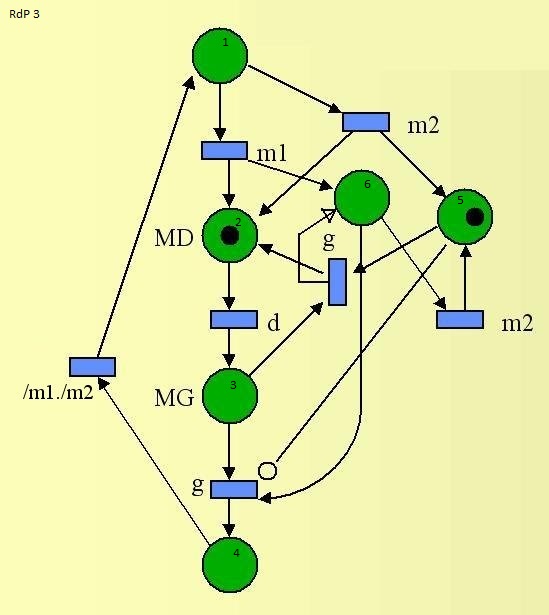
NB: La place P1 n'est pas une place partagée, elle est seulement l'origine d'une sélection. On écarte cependant tout risque
de franchissement simultané des transitions (P1-P2) et (P1-P5) en assurant que les réceptivités associées à ces transitions
s'excluent mutuellement (Produit booléen des réceptivités égal à "0"). Il suffit pour cela, d'obtenir que
l'intersection logique des réceptivités soit vide. C'est le cas
ici par l'implication de m2, vraie pour une transition et complémentée pour l'autre garantissant la relation:
(m1.g./m2).(m2.g) = 0
Cas de la place partagée P5:
Pour le marquage (P3, P5), si l'opérateur appuie sur m2 précisément à l'instant ou l'outil à charioter atteint le fin
de course d, il y a dysfonctionnement évident, le marquage atteint étant (P4, P6). Le conflit sera réglé en accordant
la priorité à m2 donc en associant la réceptivité g . /m2 à la transition (P3-P4).
Cas de la place partagée P3:
P3 se partage entre les trois jonctions (P3/P4), (P6/P2,P7), (P7/P4).
L'interprétation du réseau, notamment le graphe des marquages conséquents, montre que les possibilités de franchissements
de ces transitions s'excluent mutuellement. Il n'y a donc pas de précautions particulières à prendre. On pourra tout de
mème étudier la "robustesse" du réseau (réaction du réseau aux évènements non prévus au cahier des charges).
 RdP
RdP
http://jbsp.fr/Asic/RdpDir/Char01.htm
Synthèse en codage one-hot:
On donne ici les équations des entrées D des bascules de type D associées à chacune des places.
(Di = Qi)
Q1 = Q4./m1./m2 + Q1./(m1.g + m2.g./m1)
Q2 = Q1.m1.g + Q2./d
Q3 = Q2.d + Q3./(Q5./Q6./m2 + Q6 + Q7.g)
Q4 = Q3.Q5./Q6.g.m2 + Q3.Q7.g + Q4./(/m1./m2)
Q5 = Q1.m1.g./m2 + Q5./(m2 + Q3.g./m2)
Q6 = Q1.m2.g + Q5.m2 + Q6./( )
Q7 = Q6.Q3.g + Q7./(Q3.g)
équations des sorties:
MD = Q2
MG = Q3
Commentaires:
Les signaux logiques de commandes moteur droit MD et moteur gauche MG
sont directement les sorties de bascules. Ces signaux logiques sont donc
propres, exempts de tout risque d'aléas de course ou de glitches.
Pas de combinatoire de sortie, c'est une machine de MOORE.